Produktbeskrivning
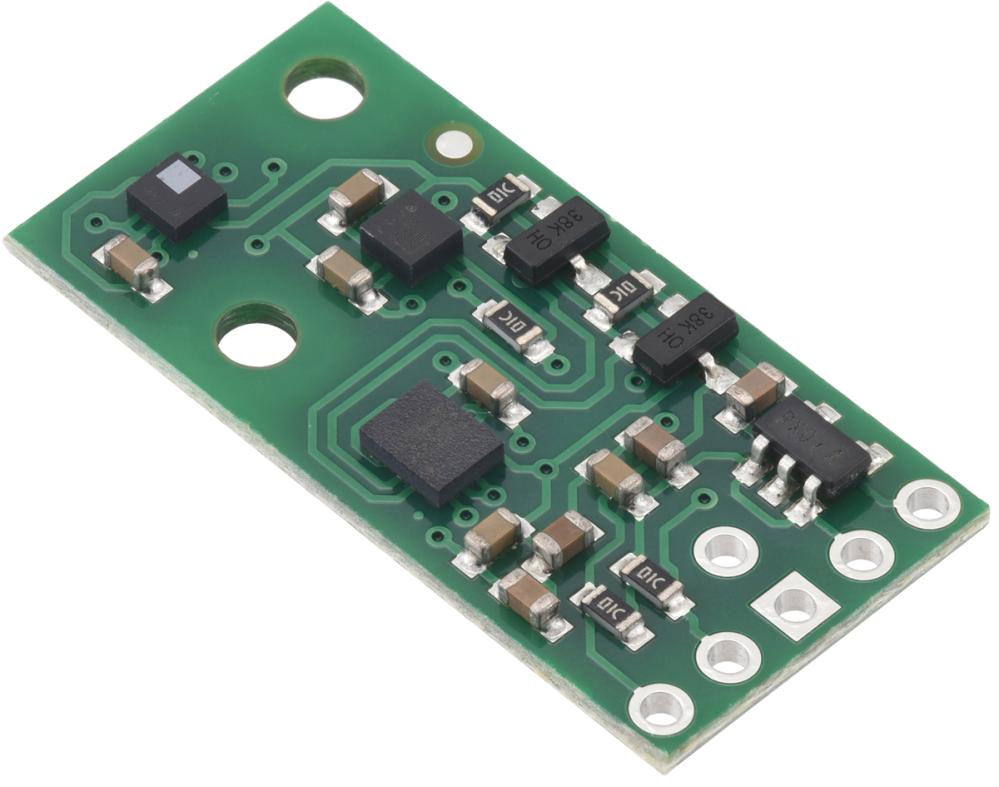
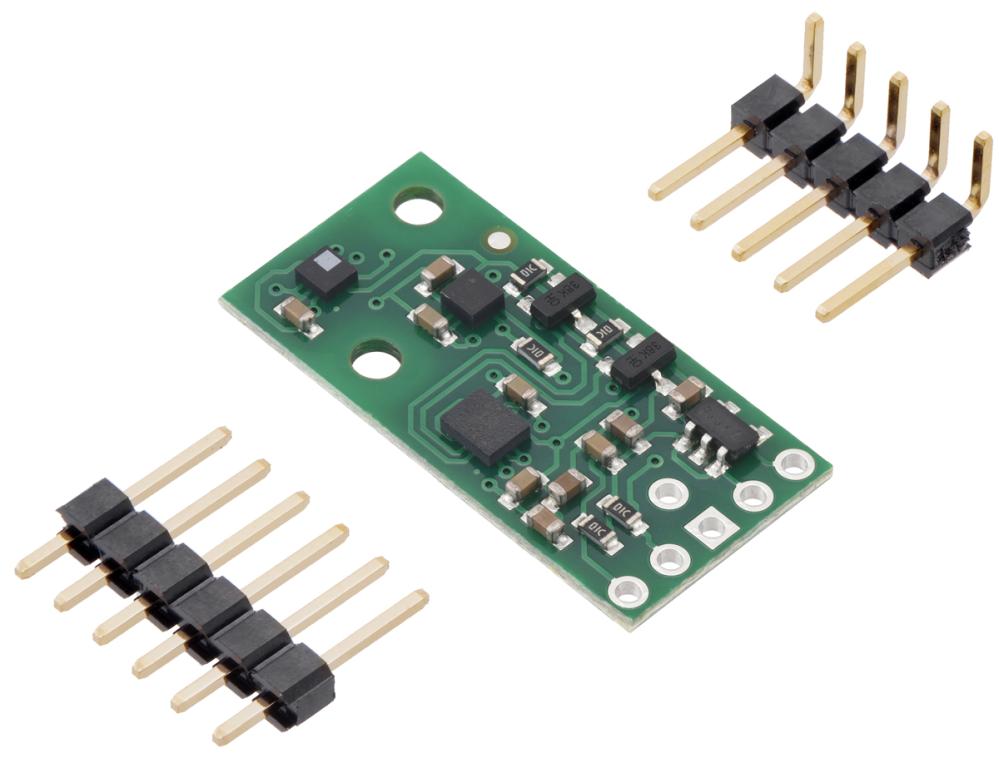
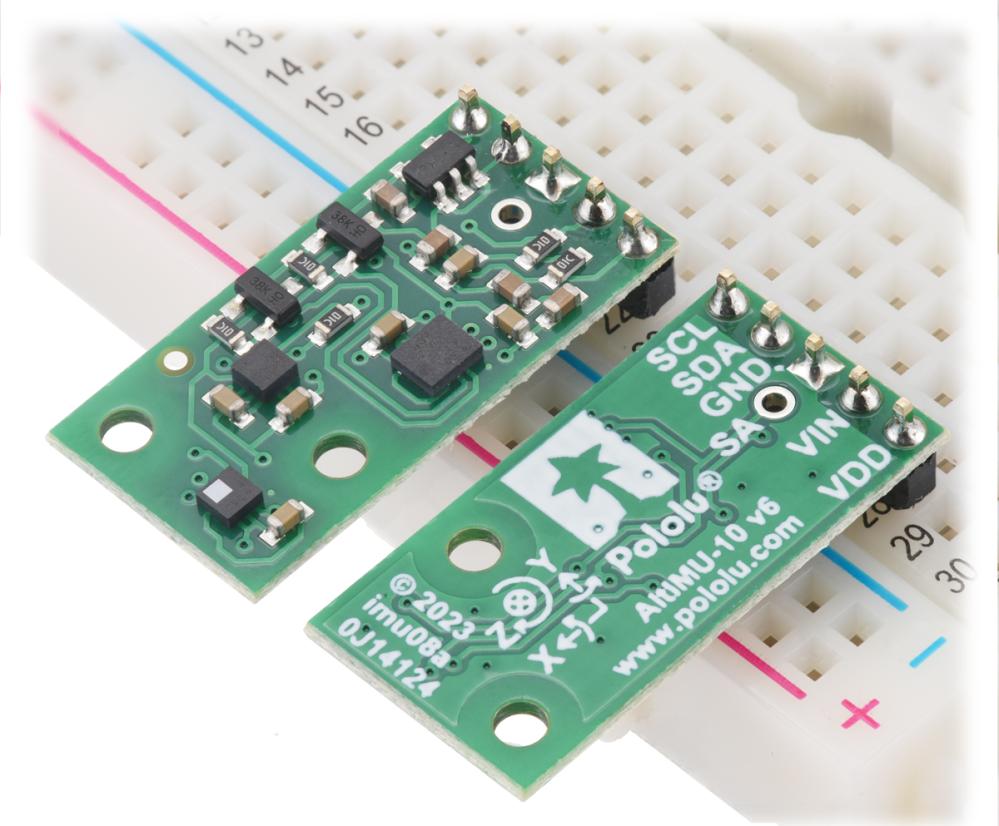
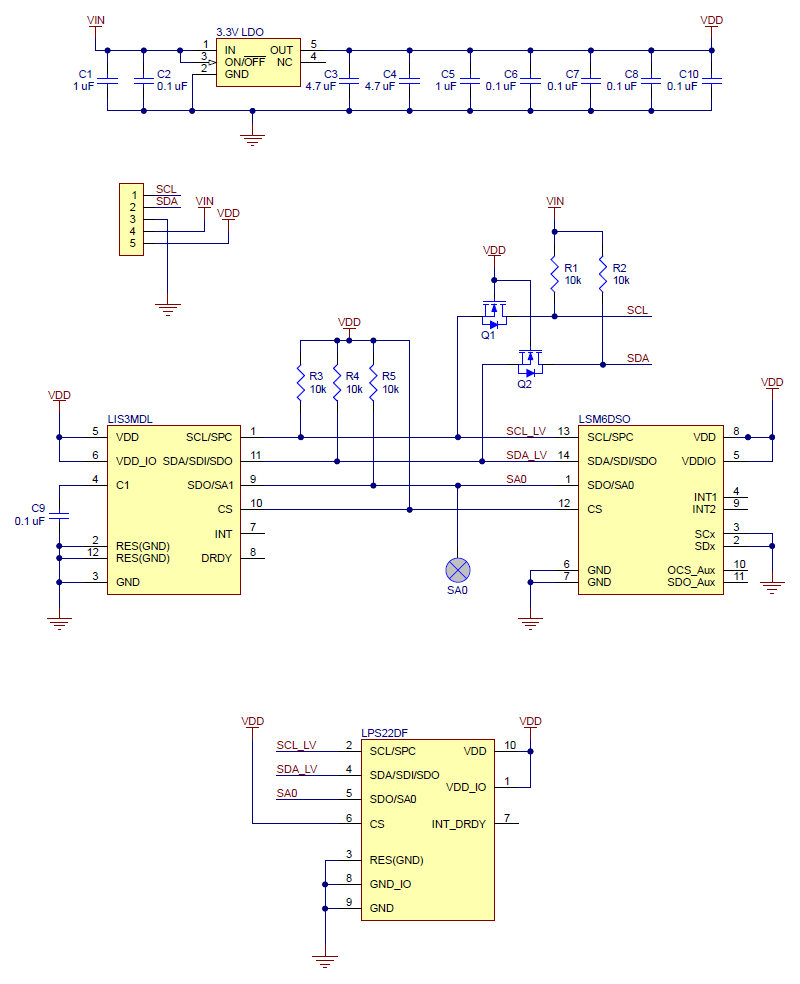
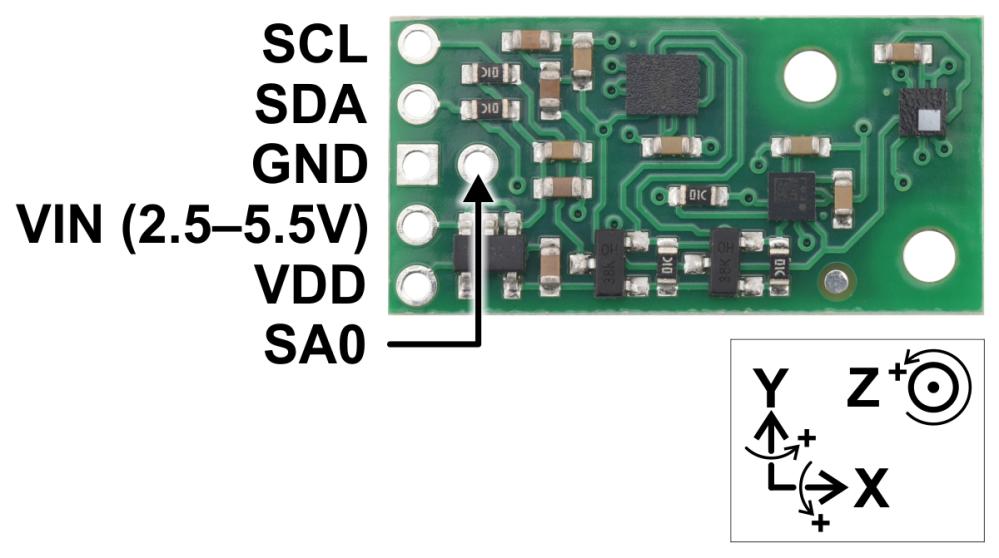
Pololu AltIMU-10 v6 är en kompakt IMU-modul och höjdmätare med LSM6DSO 3-axlig gyrosensor och accelerometer, LIS3MDL 3-axlig magnetometer samt LPS22DF digital barometer. Modulen ger tio oberoende mätvärden (10DOF) via I²C och kan användas för att beräkna orientering, höjd och rörelse i exempelvis robotik, mätutrustning och Arduino-baserade projekt. Kortet har inbyggd spänningsregulator och nivåskiftning för I²C, vilket gör det enkelt att använda med system från 2.5 till 5.5V. Levereras med stiftlist (ej förmonterad).
Specifikationer:
- Sensorer: LSM6DSO, LIS3MDL, LPS22DF
- Mätvärden: tryck, rotation, acceleration och magnetfält
- Gränssnitt: I²C
- Drivspänning: 2.5 till 5.5V
- Ström: 5 mA
- Regulatorutgång: 3.3V, upp till cirka 150 mA
- Gyroområde: ±125, ±250, ±500, ±1000 eller ±2000°/s
- Accelerometerområde: ±2, ±4, ±8 eller ±16 g
- Magnetometerområde: ±4, ±8, ±12 eller ±16 gauss
- Barometerområde: 260 till 1260 mbar
- Tryckupplösning: 24bit, 4096 LSb/mbar
- Logiknivå I²C: samma nivå som VIN
- Dimensioner: 25 x 13 x 3 mm
- Vikt utan stiftlister: 0.8g
- Monteringshål: 2st, för M2-skruvar
