Produktbeskrivning
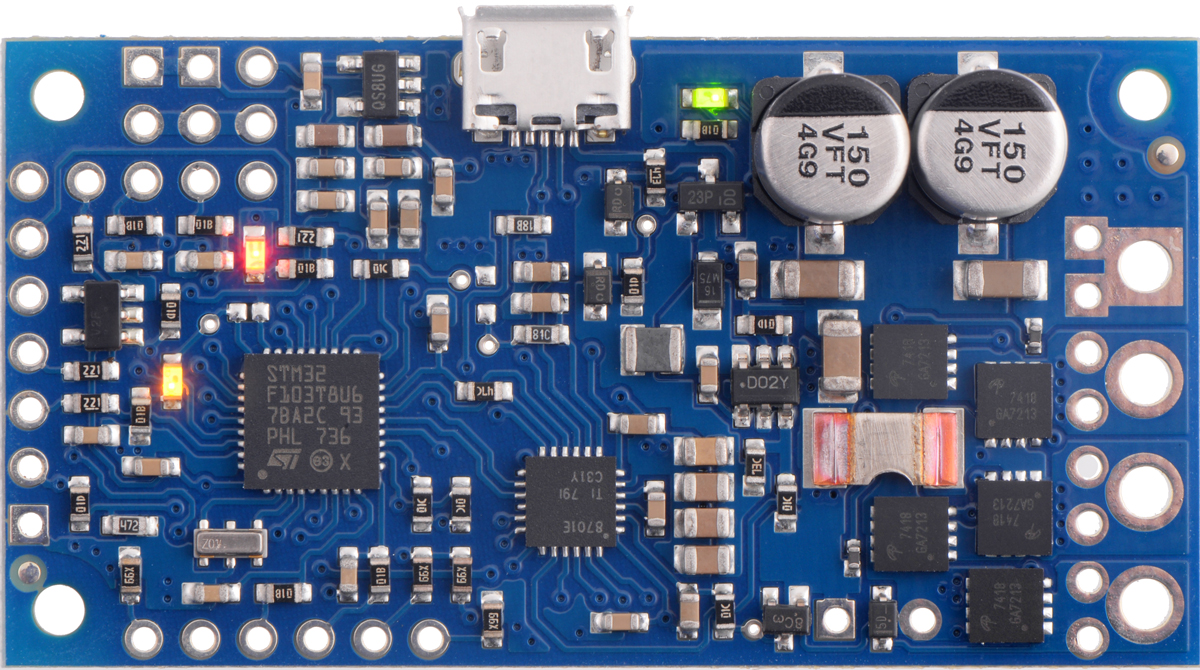
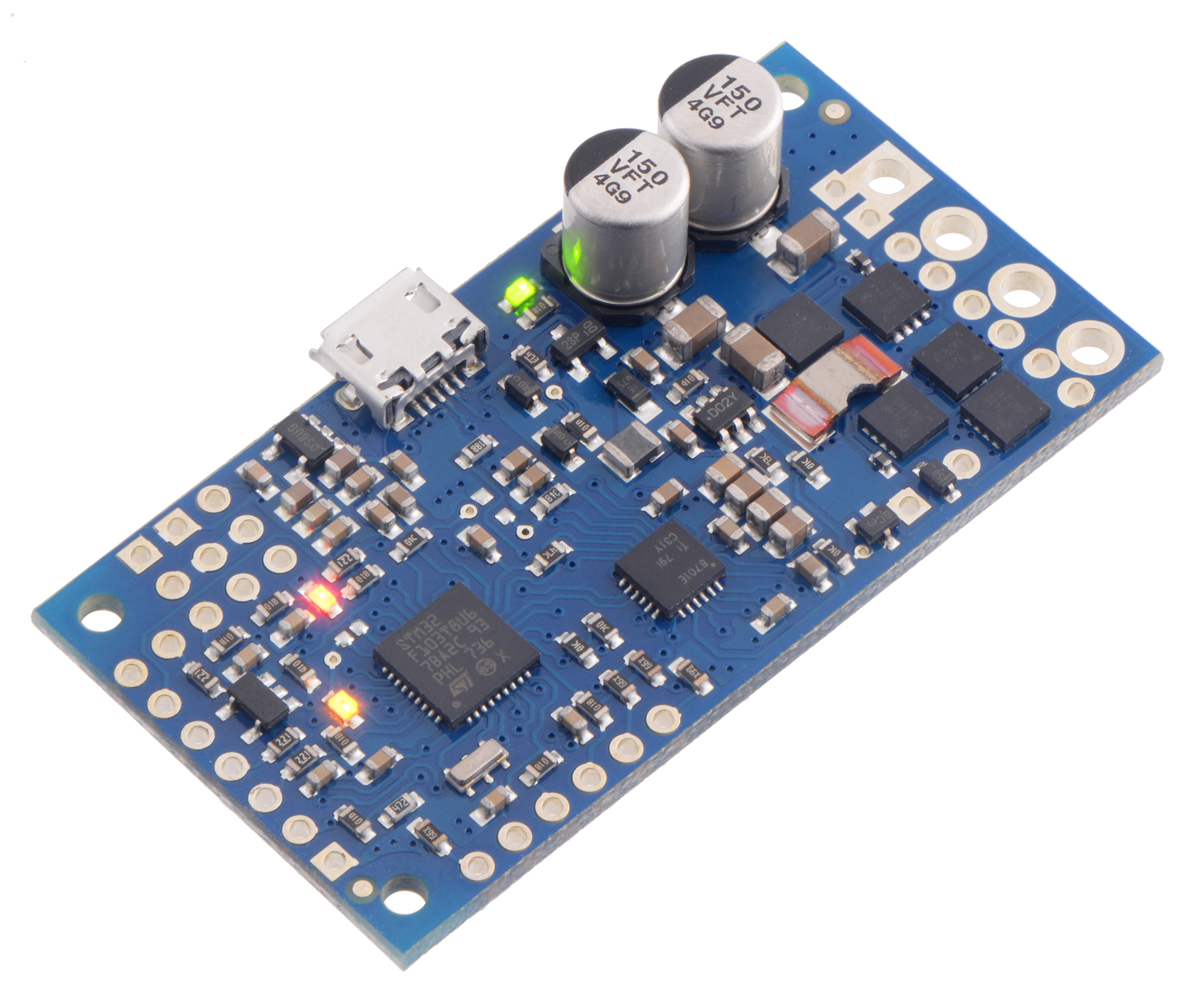
Kraftfull motorstyrning för borstade DC-motorer med stöd för flera styrgränssnitt – USB, seriell, I²C, RC och analog. SMC G2 18v15 levererar upp till 15 A kontinuerligt utan kylfläns och passar både prototyper och färdiga system. Inbyggt skydd för ström, temperatur och spänning. Konfigureras enkelt via USB med gratis programvara. Levereras med stiftlist och skruvplintar – lödning krävs.
Teknisk specifikation:
- Motortyp: Borstad DC-motor
- Spänningsområde: 6.5–30 V (rekommenderad max driftspänning: 24 V)
- Max nominell batterispänning: 18 V
- Kontinuerlig ström: 15 A (utan kylfläns)
- PWM-frekvens: justerbar 1.13–22.5 kHz (ultraljudsområde)
- Strömskydd: Justerbart hårdvarubegränsat
- Temperaturskydd: Justerbar tröskel och respons
- Spänningsskydd: Omvänd polaritet och undervoltsspärr med hysteres
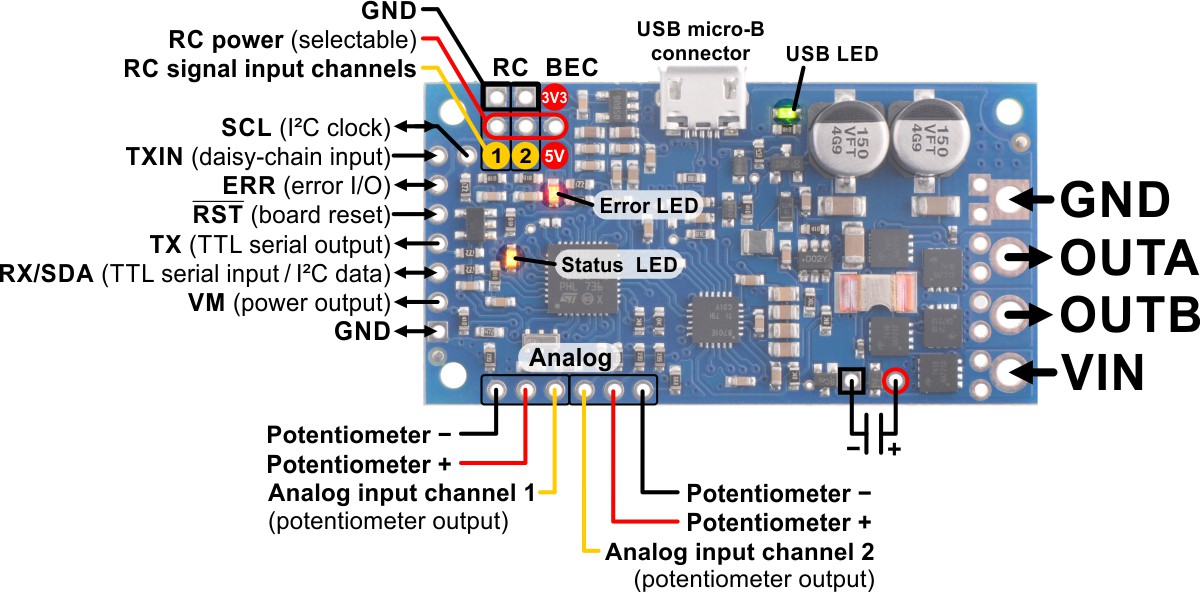
- Styrgränssnitt:
- USB (full-speed, 12 Mbps)
- TTL-seriell (RX: 0–5 V, TX: 0/3.3 V)
- I²C (1.8–5 V kompatibel)
- RC PWM (10–333 Hz, 0.25 µs upplösning)
- Analog: 0–3.3 V, 12-bitars upplösning (0.8 mV)
- Stöd för enkel- eller dubbelkanals RC/analog (mixad styrning för differentialrobot)
- Ställbar acceleration, start-/maxhastighet, valbar broms eller coast vid 0 %
- Inlärningsfunktion och justerbar skalning för analoga/RC-signaler
- Kill switch och gränslägesstöd via RC eller analog ingång
- Stöd för frånkopplingsdetektering för potentiometer/joystick
- Jumper för att strömförsörja RC-mottagare (5 V eller 3.3 V)
- Konfigurationsprogram för Windows (via USB)
- Fältuppgraderbar firmware
- Felkodslampa och ERR-utgång – kan samkopplas för synkron avstängning vid fel
Kommunikation:
- Seriell:
- Stöd för Pololu-protokoll, Mini SSC, ASCII
- Automatisk eller fast baudrate: 1200–500 000 bps
- Stöd för CRC, timeout, responstid och kedjekoppling
- Stöd för svarsfördröjning (t.ex. för halvduplex-system)
- I²C:
- Bussnivåer: 1.8–5 V
- USB:
- Virtuell COM-port
- Windows SDK med exempel i C#, VB.NET, C++
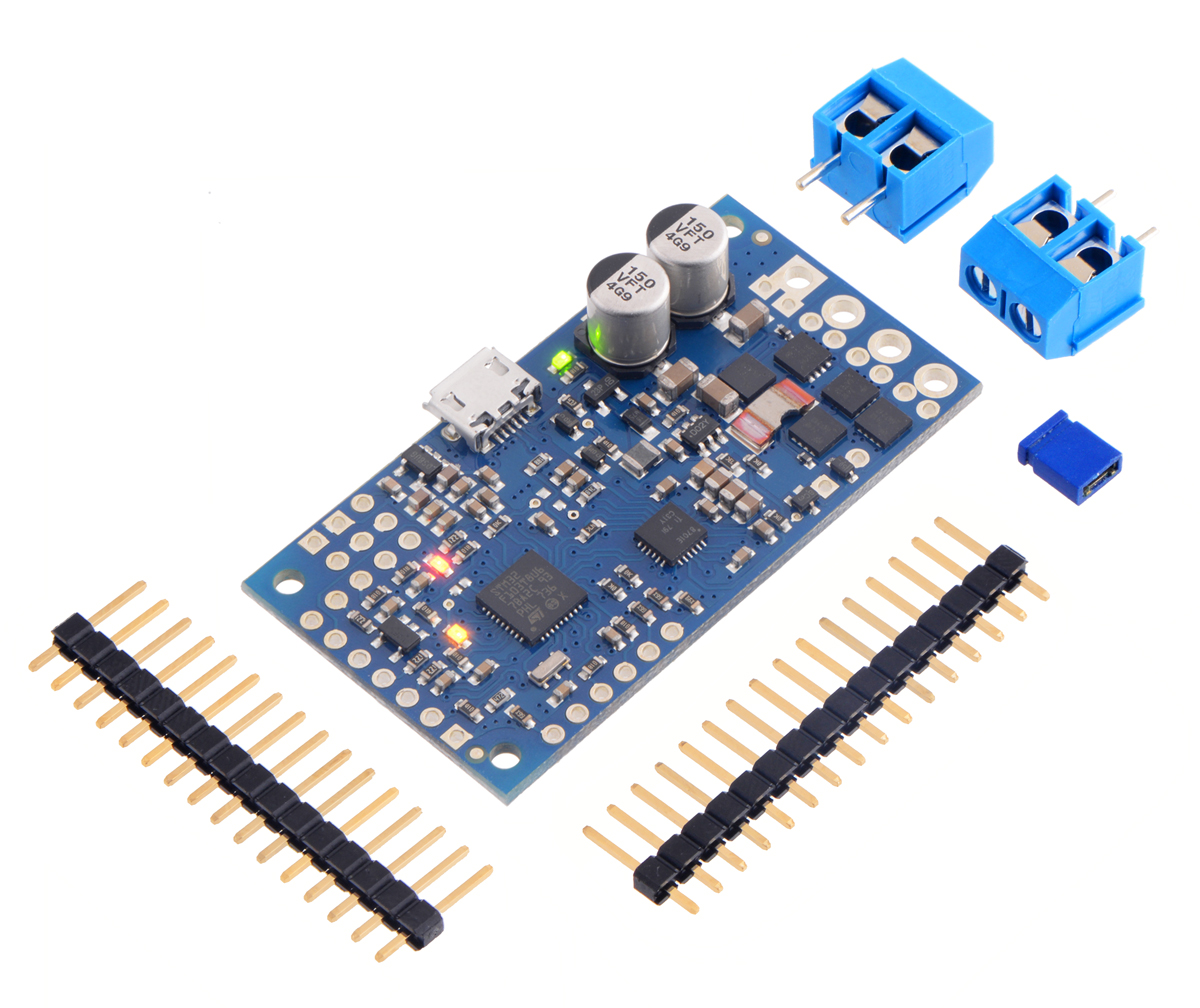
Innehåll:
- SMC G2 18v15 (utan lödda kontakter)
- 2×2-poliga skruvplintar (5 mm)
- 1× 0.1" brytbar stiftlist