Product description
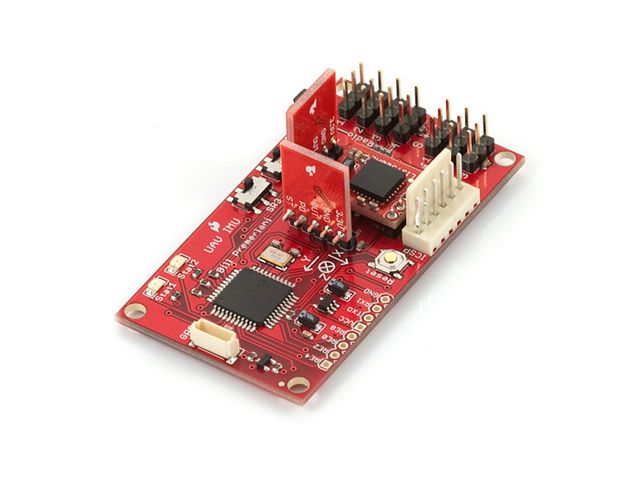
This is the new three axis UAV development board by Bill Premerlani. This board comes with a dsPIC30F4011 CPU, an MMA7260 three axis accelerometer and 3 LISY300AL gyros. It is intended for the do-it-yourselfer. By itself, it can be used to develop a three axis IMU controller. With the addition of an EM406 GPS receiver it can be used to develop a UAV controller for an RC car, plane, or boat. It comes with self-testing firmware that serves as a starting point for you to develop your own control and navigation firmware.
Features:
* Connection for a 20-Channel EM-406A SiRF III GPS Receiver (not included)
* PIC dsPIC30F4011 Controller (with onboard 3.3V and 5V glue logic)
* dsPIC runs at 120MHz with 16MHz resonator and PLL
* MMA7260 three axis accelerometer
* 3 LISY300AL gyros
* 4 Input, 3 output PWM points
* 6-Wire ICSP debug header
* 2 Separate colored status LEDs
* 3 General purpose switches
* On board 3.3V and 5V regulators (150mA max)
* 10m Positional Accuracy / 5m with WAAS
* GPS Outputs NMEA 0183 and SiRF binary protocol
* Spare USART connection for debugging
* 4 Spare digital I/O pins for debugging
Dimensions: 1.5 x 2.75 x 1.0"
Weight: 34 grams (controller and GPS)
Features:
* Connection for a 20-Channel EM-406A SiRF III GPS Receiver (not included)
* PIC dsPIC30F4011 Controller (with onboard 3.3V and 5V glue logic)
* dsPIC runs at 120MHz with 16MHz resonator and PLL
* MMA7260 three axis accelerometer
* 3 LISY300AL gyros
* 4 Input, 3 output PWM points
* 6-Wire ICSP debug header
* 2 Separate colored status LEDs
* 3 General purpose switches
* On board 3.3V and 5V regulators (150mA max)
* 10m Positional Accuracy / 5m with WAAS
* GPS Outputs NMEA 0183 and SiRF binary protocol
* Spare USART connection for debugging
* 4 Spare digital I/O pins for debugging
Dimensions: 1.5 x 2.75 x 1.0"
Weight: 34 grams (controller and GPS)